Seamless fusion of high-resolution DEMs from multiple sources
Anna Petrasova, Helena Mitasova, Vaclav Petras, Justyna Jeziorska
Center for Geospatial Analytics, NCSU
NCGIS 2017
Background
In partnership with NextGen Air Transportation System (NGAT)
Center for Geospatial Analytics (CGA) collects, processes and analyses UAS data
for research and education purposes


UAS & lidar course

Data collection and analysis:
- flight planning, characteristics of UAS and lidar data, errors, point cloud processing and DEM reconstruction, landscape processes
Student projects:
- mapping soil erosion, beaver dam impact
- crop growth monitoring, forest structure
Software:
- GIS, SfM software (AgiSoft, OpenDroneMap), Python scripting
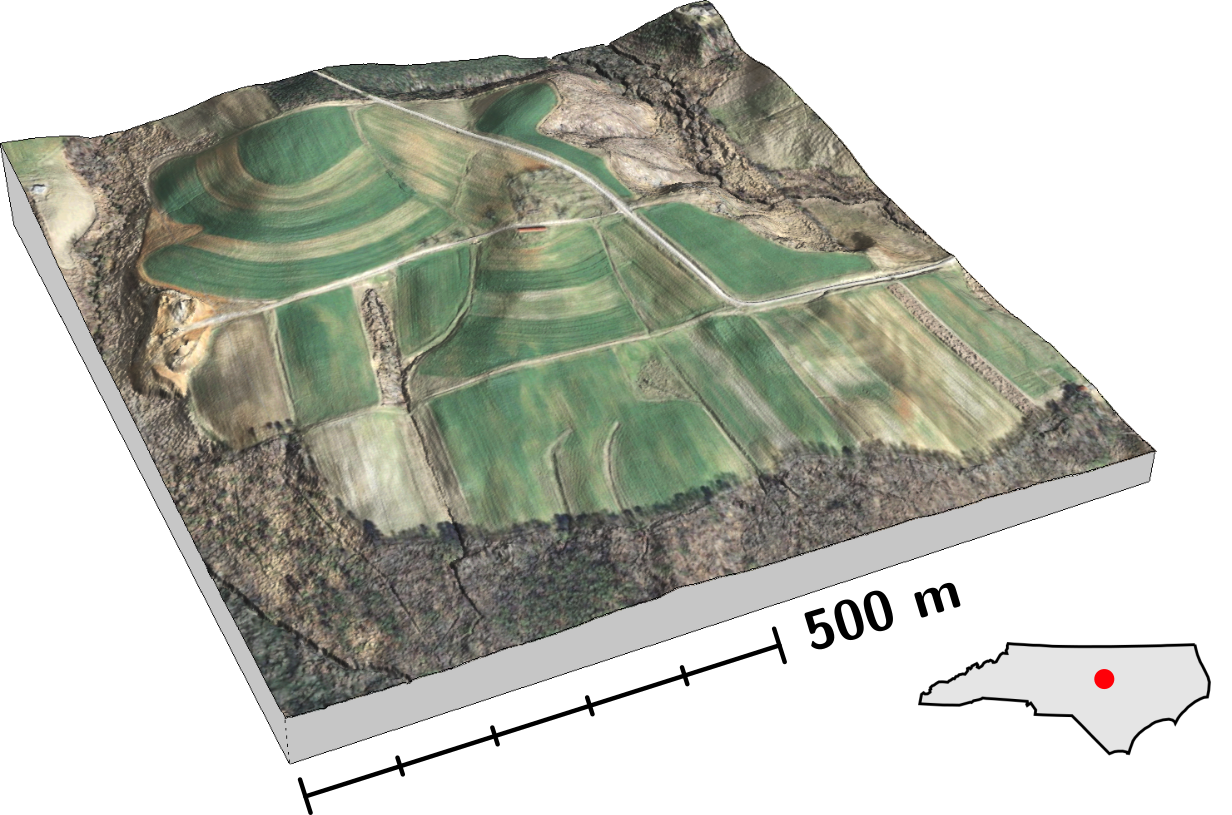
Lake Wheeler Road Field Laboratory
study area
2015 - 2017
Data analysis

| change detection | processes | microtopography |
Modeling landscape processes
at a microtopographic level
 |
water flow erosion landscape evolution |
 |
UAS + SfM
- very dense point clouds (hundreds per square meter)
- simple to repeat data collection
- smaller area
- some areas are excluded
- difficult to extract ground
UAS + SfM
- very dense point clouds (hundreds per square meter)
- simple to repeat data collection
- smaller area
- some areas are excluded
- difficult to extract ground
Airborne lidar
- moderately dense point clouds (several points per square meter)
- expensive, can't be repeated often
- large area
- provides ground data
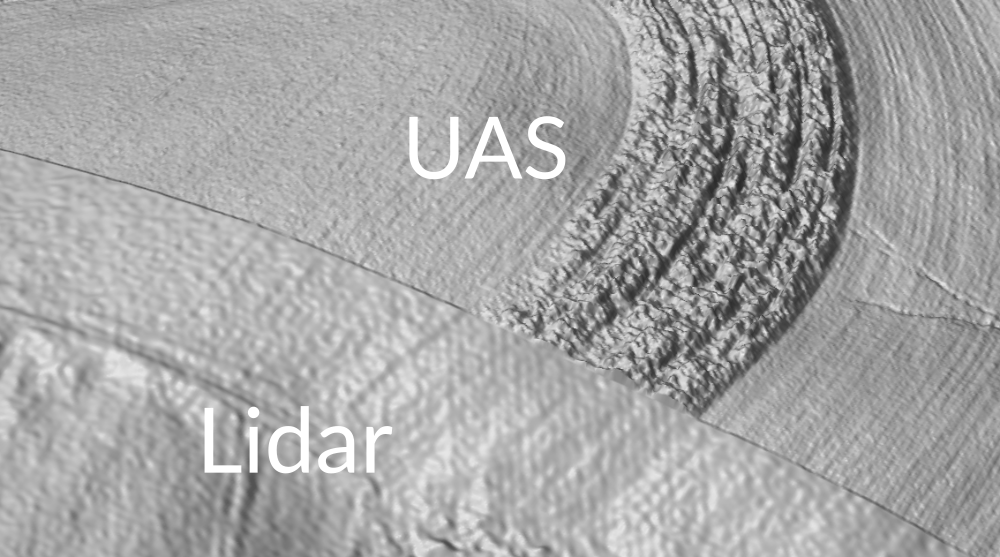
DEM fusion
aka DEM mosaicking, merging, patching
Motivation:
- boundaries of UAS-based DEM and modeled phenomenon don't match (e.g. watersheds)
- need to replace vegetated areas with ground
- updating part of older DEM with newer DEM
What we need:
- simple and robust raster- and GIS-based method
- continuous DEM with smooth transition between different DEM sources
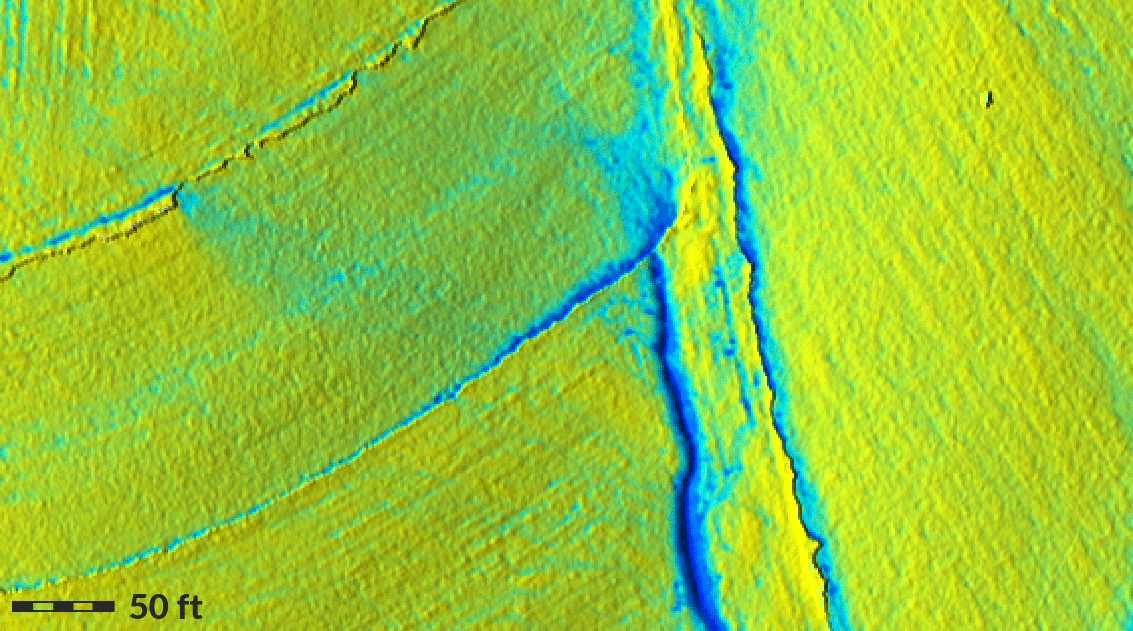
Problem
new = if(isnull(UAS), lidar, UAS)
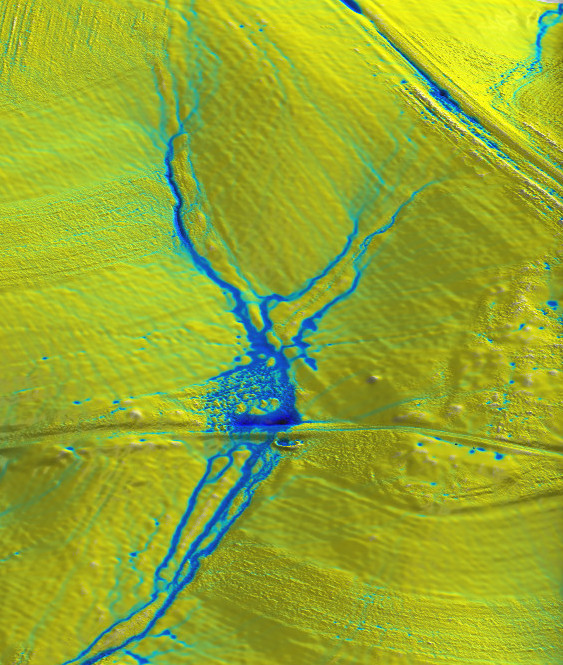
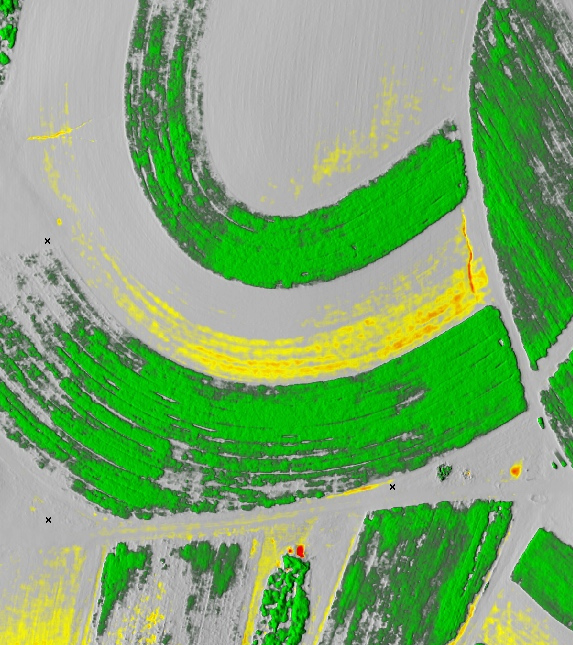
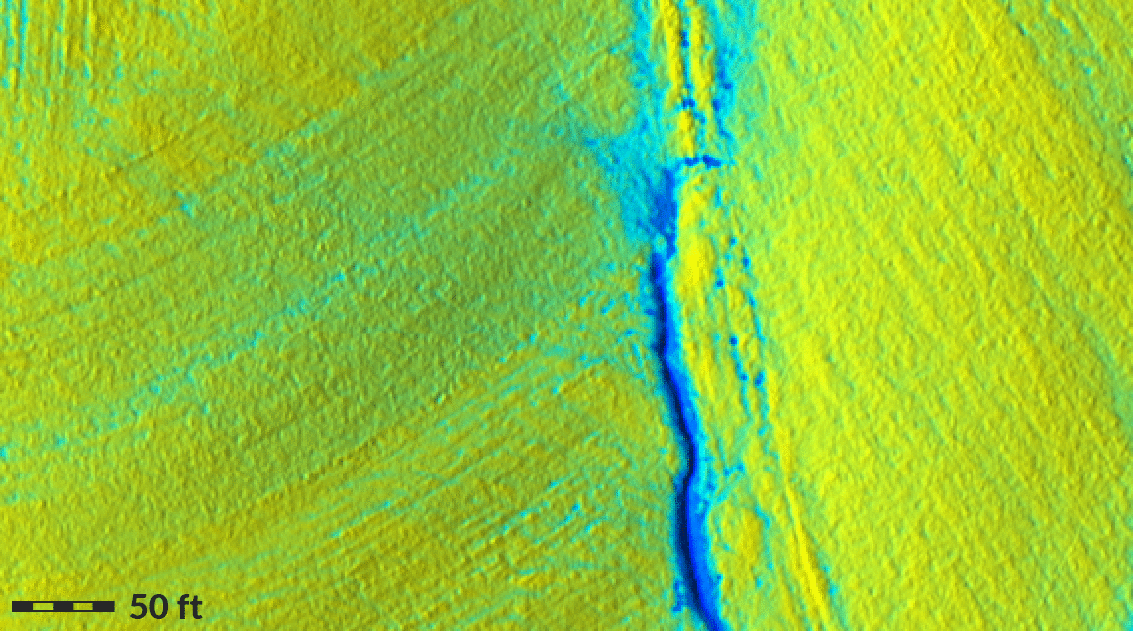
Water flow on patched DEM
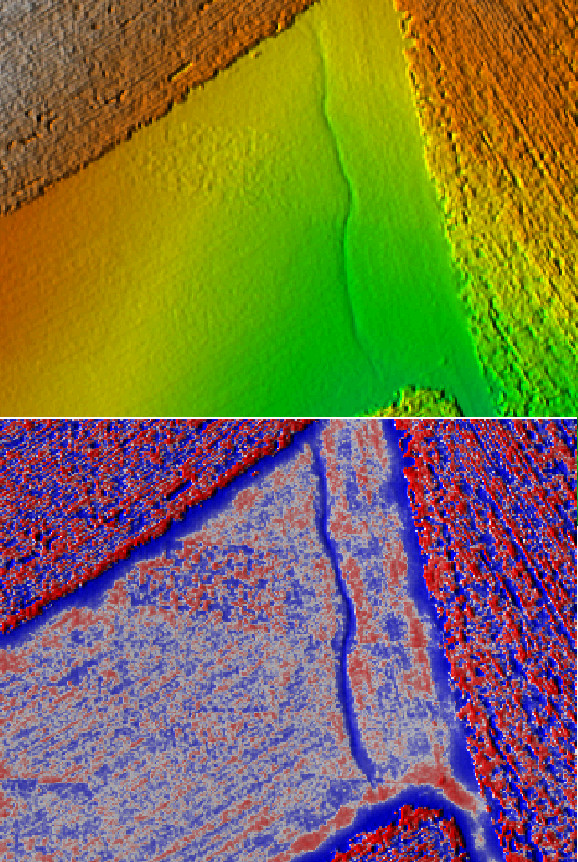
Water flow on fused DEM
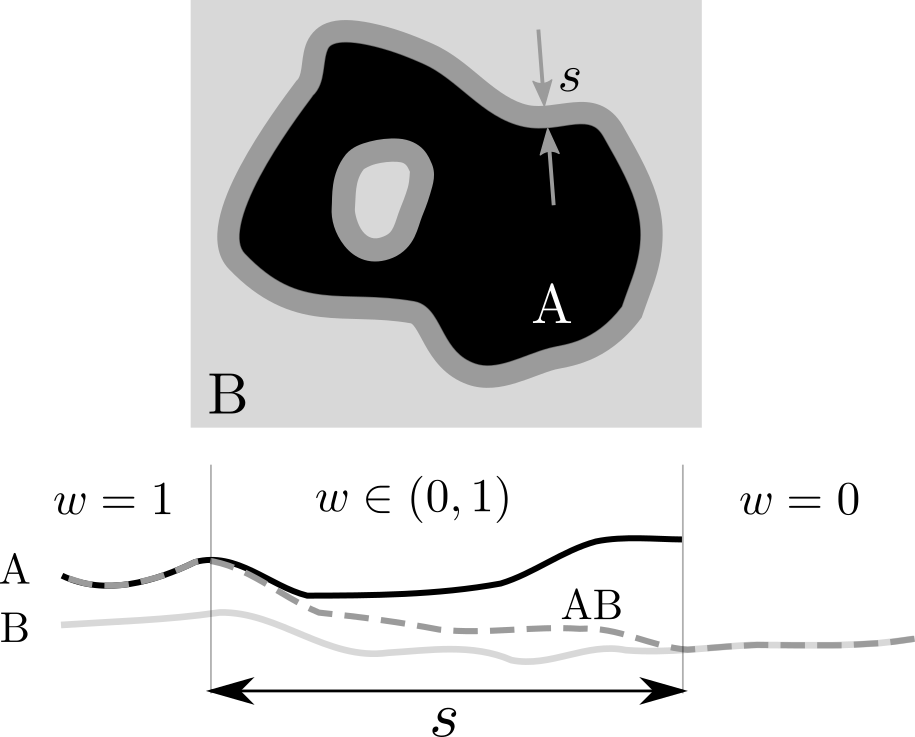
Fusion method (v1)
Compute weighted average of DEM $A$ and $B$ on their overlap of width $s$ with weights given by the distance to the edge of DEM $A$.
What do we need?
- two DEMs of the same resolution and aligned
- raster algebra
- euclidean distance tool
Step 1.
| Distance from the edge of DEM $A$ inwards. | 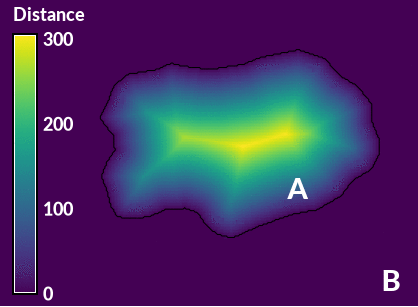 |
GRASS GIS:
r.grow.distance -n input=A distance=distance
Step 2.
Linear combination of elevation surfaces $z_{A}$ and $z_{B}$ with weights given by distance $d$ and overlap width $s$ : $$ z_{AB} = z_{A} w + z_{B}(1 - w), \quad\quad w = f(s, d) = \begin{cases} \frac{d}{s} & 0 \leq d < s \\ 1 & d > s \end{cases} $$
Raster algebra expression for $s = 10$ m:
if (distance > 10, A,
if (distance == 0, B,
(1 - distance / 10) * B + (distance / 10 * A)
)
)
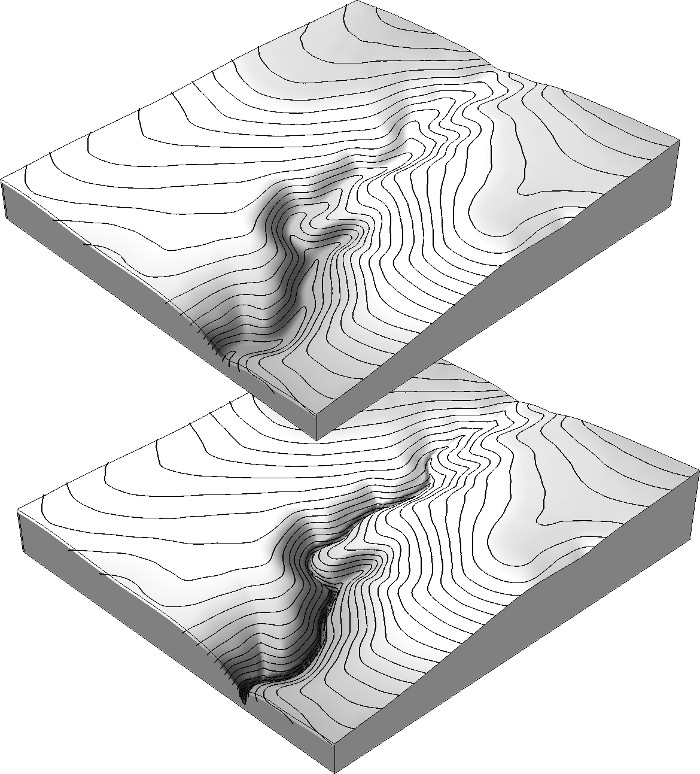
Smoothing parameter $s$
| 0 m | 5 m | 10 m | 20 m |
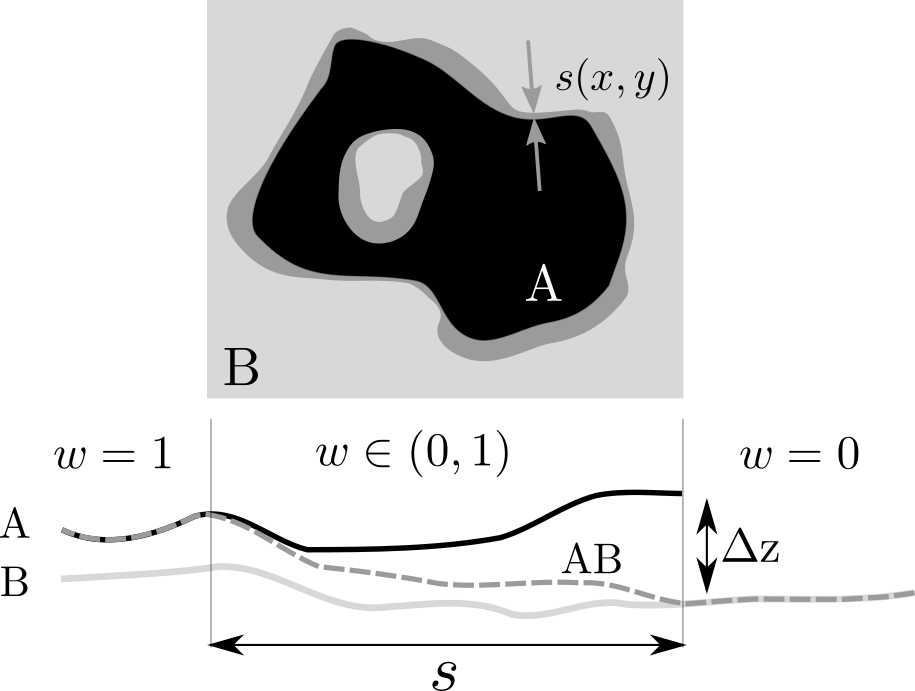
Fusion method (v2)
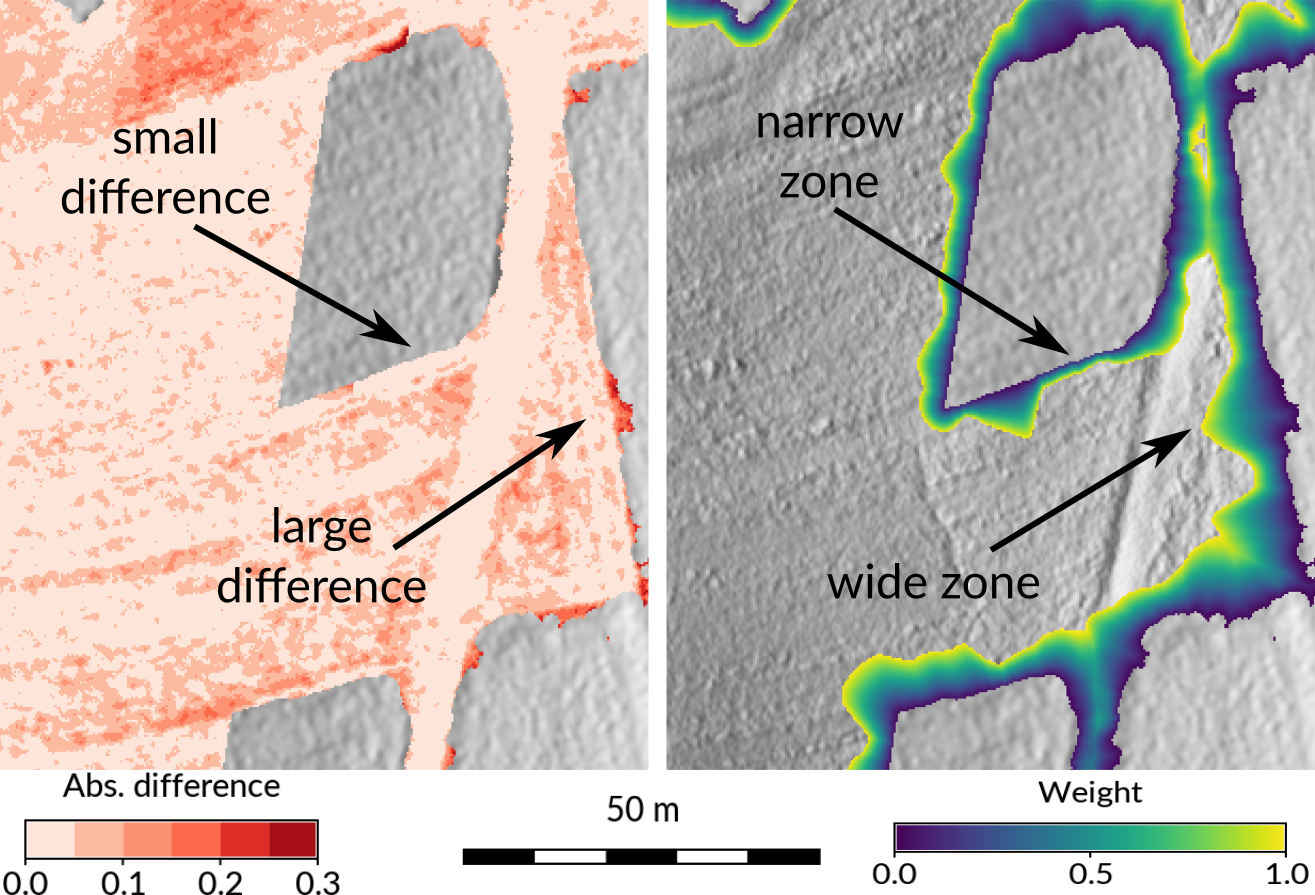
By taking into account spatially variable differences $\Delta z$ between DEMs $A$ and $B$ along the overlap:
- we get more gradual transition where differences are high
- we preserve subtle features of both DEMs where differences are small
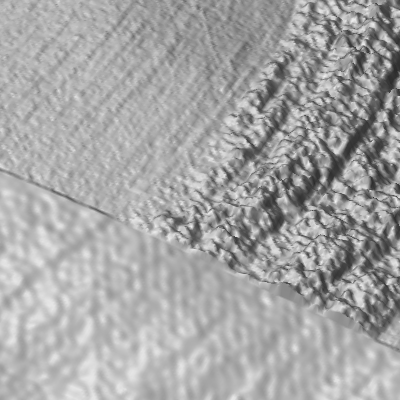
Fusion method (v2): example
Fusion method (v2): steps
- Compute distance from DEM $A$ inwards (distance tool).
- Derive absolute difference between A and B, and from that extract one-pixel-wide edge as raster (raster algebra).
- Derive raster where each cell has the value of the nearest cell from that edge raster (distance tool).
- Combine the distance raster from step 1) and the raster with differences from step 3) into raster representing weights (raster algebra).
- Compute linear combination of DEMs using this raster of weights (raster algebra).
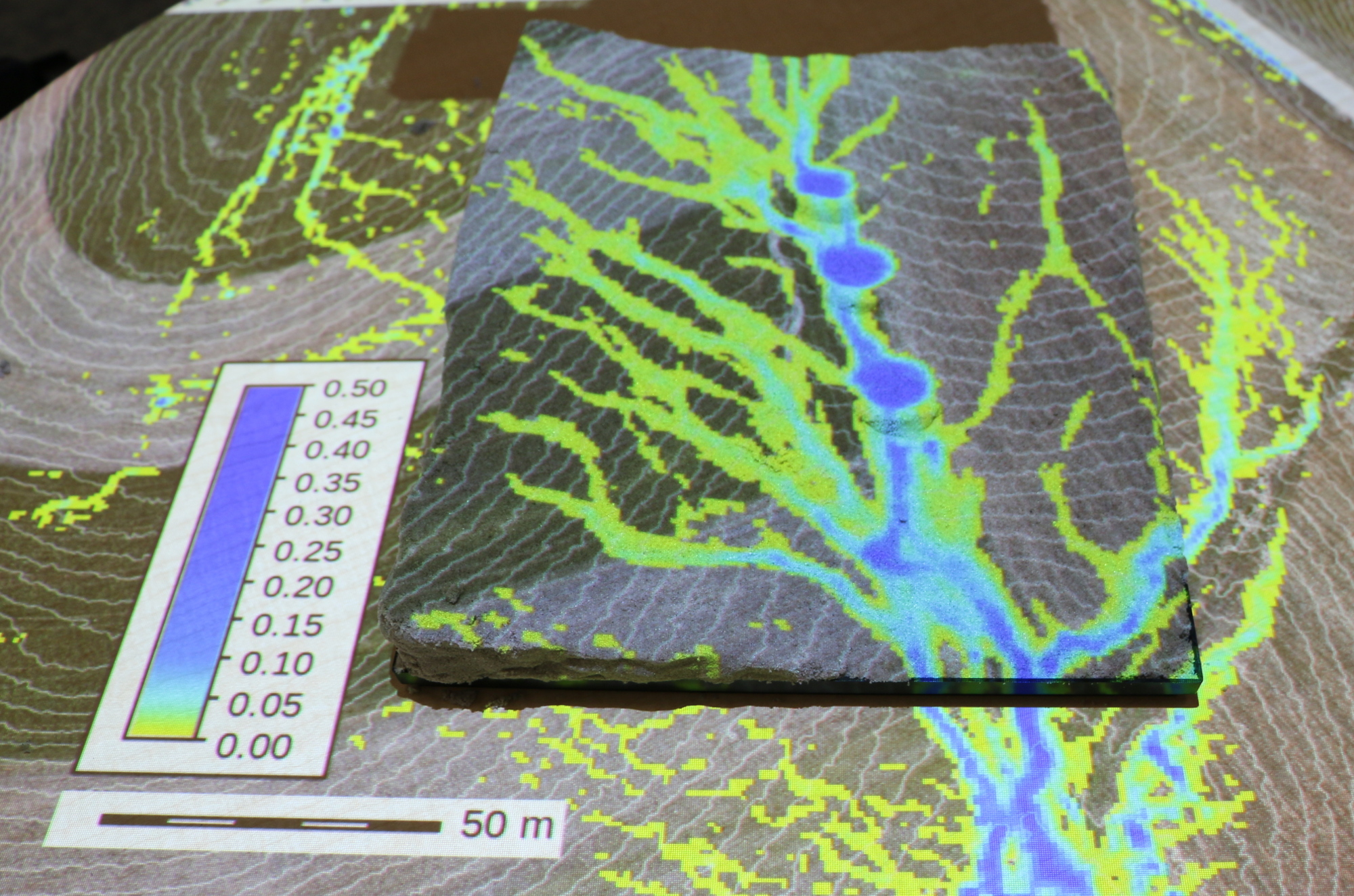
Use case: Tangible Landscape
- tangible geospatial interface
- couples a malleable physical model with a digital landscape through a cycle of real-time scanning, analysis, and projection
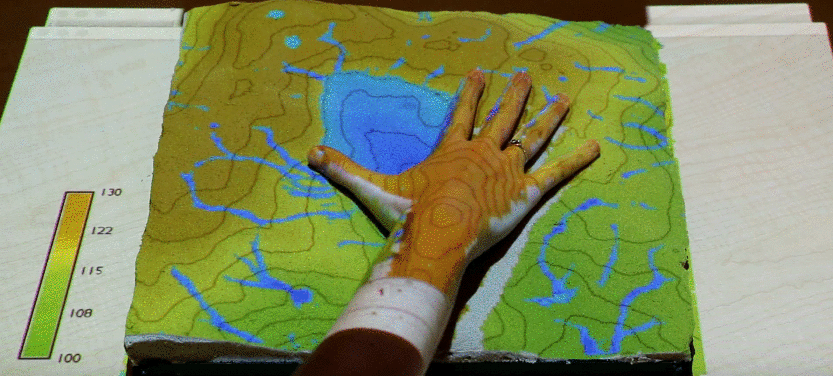

Fusion of lidar- and kinect-based DEMs
- simulating and testing methods for controlling storm water flow
- we need smooth fusion to let simulated water flow into and out of the model
- real-time fusion of a georeferenced, physical sand model scanned continuously by Kinect with a lidar-based DEM of the surrounding watershed
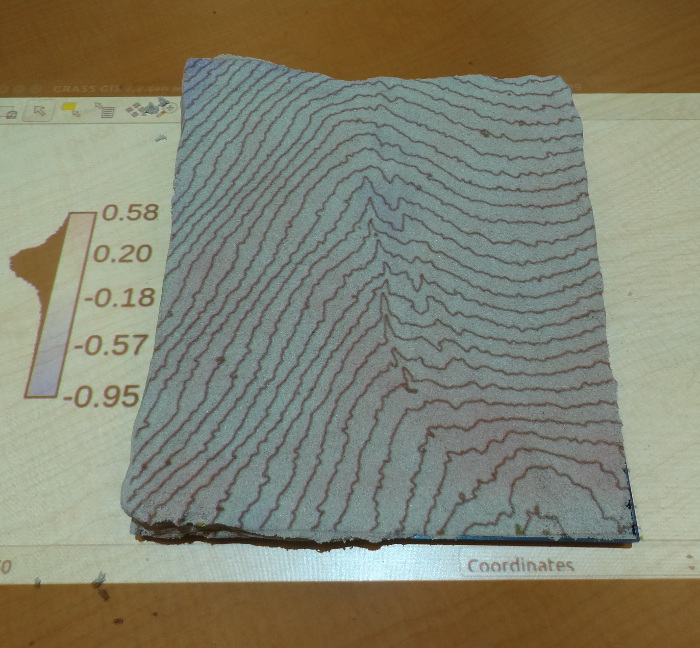
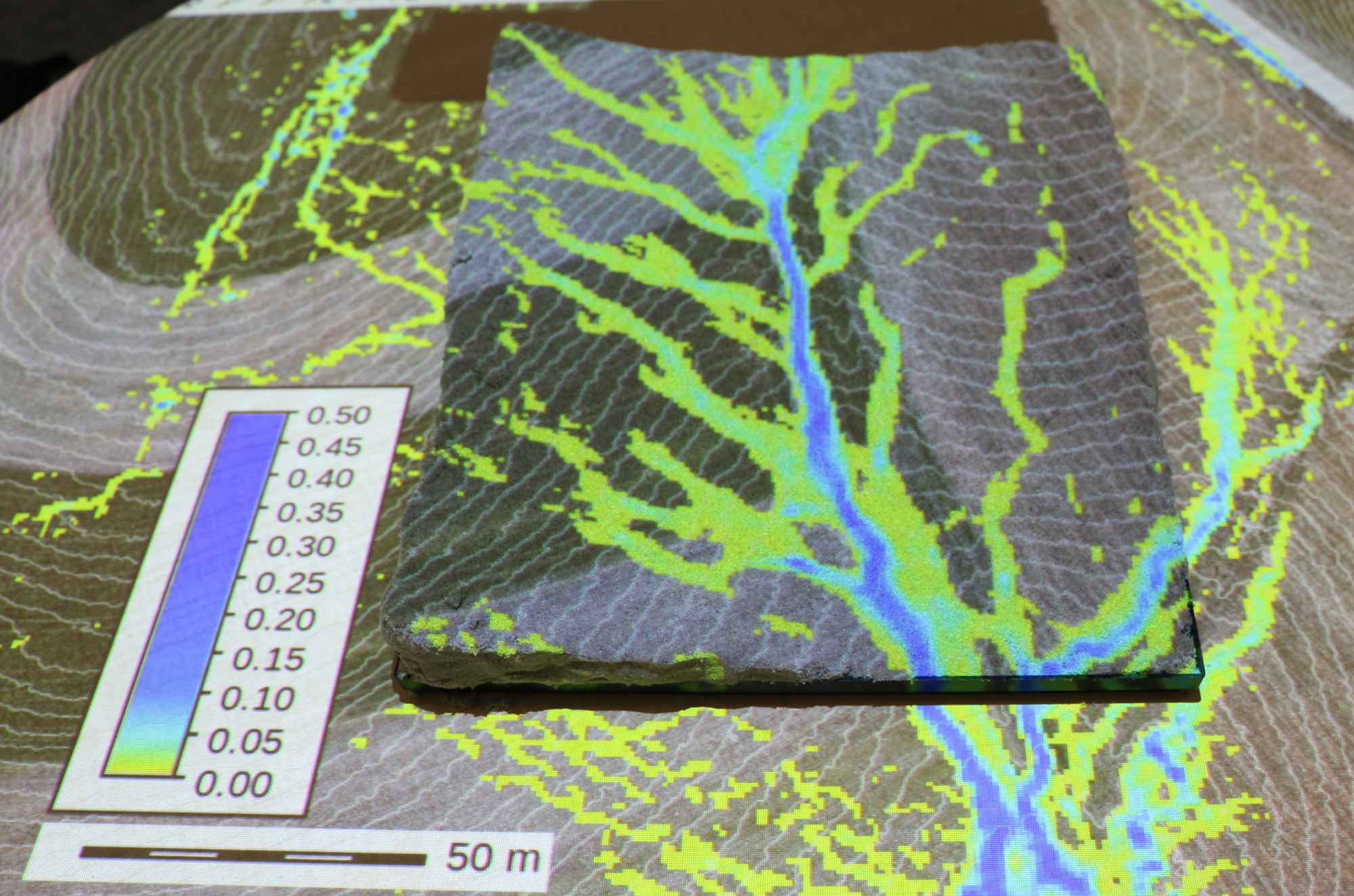
| sand model | before change | modified landscape |
Resources
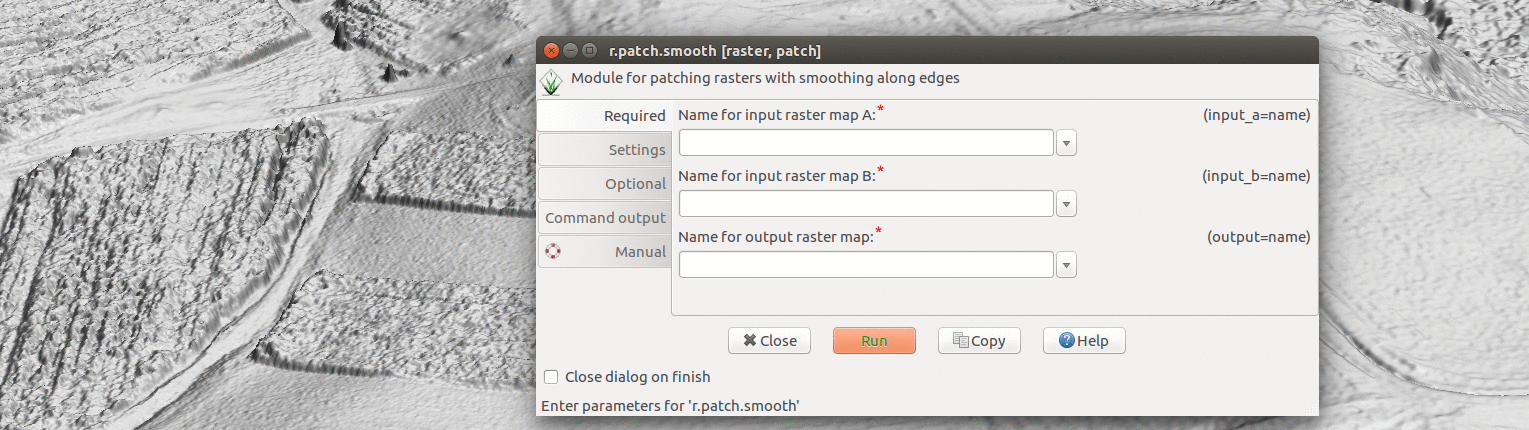
- Method will be published in Open Geospatial Data, Software and Standards as open access article
- GRASS GIS addon r.patch.smooth
g.extension r.patch.smooth url=https://github.com/petrasovaa/r.patch.smooth - Sample dataset for testing: geospatial.ncsu.edu/osgeorel/data.html